
Last year, 2019 Art + Technology Lab grant recipient Eun Young Park began her project, Radical Soft Robots, which examines the artistic possibilities of “soft robots,”—robots made with soft materials including silicone, vinyl, fabric, and paper. Inspired by the use of inflatables by utopian artists of the 1960s, the artist aimed to produce prototypes that LACMA visitors could engage with. In the face of current pandemic travel restrictions, the Helsinki-based artist adjusted her "half-time" presentation into a report where she would have the opportunity to discuss the process rather than the outcome. Already Park's approach and ideas have shifted as her project has evolved, which she believes is quite natural in pursuing an artist project. What follows are her trials, errors, and new directions she has taken over the past year.
Pillow Study
Pillow Study is a tentative project in the exploratory first phase of my project. It started by thinking that the repetitive prototyping and modification of pillow-scale actuators/robots would help me to understand the materials and technology involved, as well as provide an inspiration for further development of this project. By the pillow I mean: a) its scale that can be expanded to furniture, wearables, interior architecture, or human-scale installations; b) its modularity as a building block that can be combined and adapted in order to build other artifacts; c) its soft materiality. In other words, this project is about making swatches for the next phase of the project. While I am still making prototypes, below are some that reflect my research and ideas.
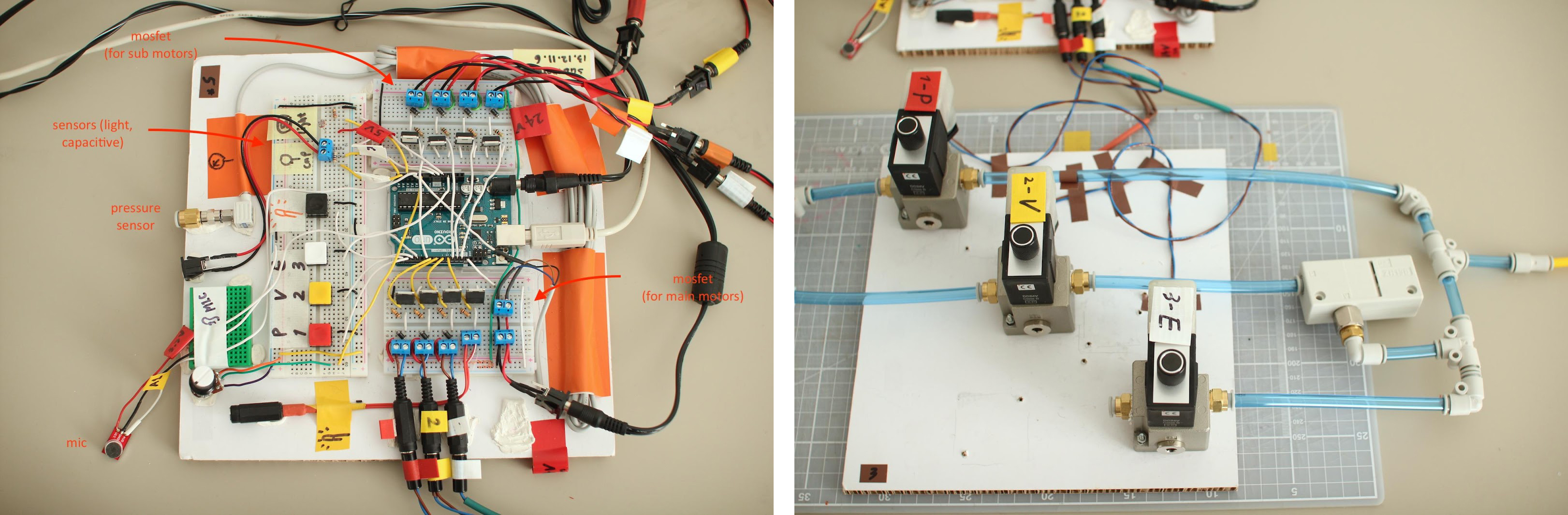
Research also includes learning how to control air. Referring to existing open-sourced controllers¹, I designed a controller unit for pillow-scale soft robots. Photos courtesy of Eun Young Park.
Breathing
Breathing is one of the most primitive bio-inspired movements. Breathing is about existing, as well as feeling intimate and empathetic. We comfort ourselves and feel accompanied when there is something breathing next to us. One pillow breathes in tune with bio signals, in this case, with a heartbeat; the other is made responsive to our touches so that when the pillow is out of breath, it can be calmed down with a gentle touch.
Texture
When slow movement is combined with textured skins, it creates an aesthetic impact amplifying the change. The texture can be made with various methods, for example, by folding or cutting papers, manipulating fabrics etc. Depending on the surface design and material, it transforms its shape in varied ways, e.g. by popping up and unfurling. I was particularly fascinated with auxetic design that makes a kinetic surface out of static material. What if there was a breathing wall or a fashion item with an auxetic surface responsive to environmental and biological signals?
Light
When lights are embedded in pillows, changing of the shape becomes more visible and attracts attention, which opens up a new possibility of application. Light-embedded pillows create interesting textured reflections on the wall and they can dim or brighten lights creating a reflective or playful mood.
Form-making
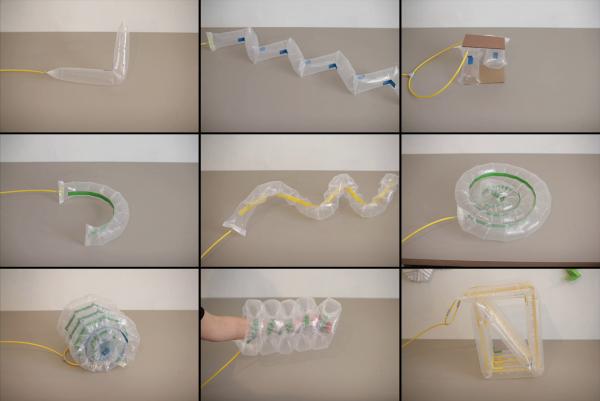
There can also be more active pillows that can grow, fold, spiral, roll, and finally make specific forms. This can be achieved by designing folds: angles, sizes, frequency, and the sequence of the folds. It is also possible to combine multiple actuators for a bigger or more complicated form. Inspired by the research on space-navigating soft robots, I particularly took note of its capacity for form-making. I explored the possibility of making furniture or a structure that pops up from a flat sheet. In addition, the active sequential performance of movement and the playful form opens up an opportunity for the designing of space and artistic installations. The prototypes were made with basic materials, such as rolls of polyethylene tube and insulating tape. Because it is the easiest and the most accessible way to make a soft actuator, you can even try to make your own DIY soft robot to understand the design and behavior of it.
Memory
You might have heard of memory foam pillows. But if it is about adjusting to a certain shape, I am talking about retaining the memory of a form. Actually vacuum forming is quite a common method to shape plastic-based products using air suction and there are also precedent examples of making a vacuumed bean bag chair². Inspired by both, I made prototypes of memory pillows: one normal, the other a flat blanket-pillow. They can be solidified and softened by clapping signals, so I called it the Freeze Tag pillow. What if I fold and fasten a flat blanket-pillow to make different wearable items? What if a dress can shrink or be loosened to fit our body? What if a pillow can be transformed to various solid shapes either by our design or by remembering a certain shape?
Blanket and More
I went a bit further with the flat pillow idea. Being flat, pillows can be folded and transformed into a variety of three-dimensional forms with one actuator, as well as made into screens and responsive elements in wearables, furniture, and other products. This can be achieved by a few different methods, for example, by embedding a folded origami structure inside the pillow as a skeleton, or designing a pattern for air channels. In addition, I tried out a few other concepts, which I am still continuing to develop. One of them is to design modular actuators that can be combined to achieve desired shapes and movement. The other is related to a height-changing cylinder, which attracted my attention with its potential as a furniture element. I also tinkered with the idea of other active pillows that move forward by sliding or walking.
This is how my ideas began and have been developing thus far. At the outset of the project, my concern was more on soft robots, but it gradually shifted to the softness and slowness of technology in a broader sense. I researched related materials and technology, and for most of the time built prototypes modifying them continuously, whereby I drew inspiration for the next step. The coming phase of the project will be focused on the fusing of these swatches into more specific objects, such as an armchair, a light, a wall, a dress, and an installation. I look forward to sharing the outcomes then, hopefully in person at the museum.
This project was made possible by LACMA's Art and Technology Lab Grant and was partly funded by an Aalto ARTS Grant. The work spaces and facilities were supported by Aalto University, School of Arts, Design and Architecture.
The Art + Technology Lab is presented by
![]()
The Art + Technology Lab is made possible by Accenture, YouTube Learning, and Snap Inc.
Additional support is provided by SpaceX.
The Lab is part of The Hyundai Project: Art + Technology at LACMA, a joint initiative exploring the convergence of art and technology.
Seed funding for the development of the Art + Technology Lab was provided by the Los Angeles County Quality and Productivity Commission through the Productivity Investment Fund and LACMA Trustee David Bohnett.
¹ Programmable Air, Pneuduino, and Soft Robotics Toolkit
² Ron Arad, Transformer chair (1981), Mutant Materials in Contemporary Design by Paola Antonelli, page 16, The Museum of Modern Art, 1995